本文将对卡尔曼滤波做一个粗略总结~
1、问题描述
假定一个机器人导航,其状态用$\vec{x_k}$描述:
2、Kalman filter如何看待该问题
采用一个向量描述状态:
两个假设:
- p和v都符合高斯分布,数学期望为$\mu$,方差为$\sigma ^{2}$,
- 随机
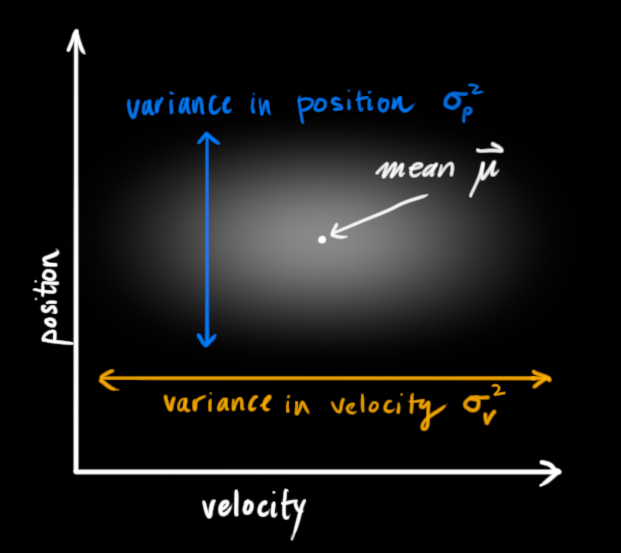
我们考虑速度和位置是有关联的:
矩阵描述问题
协方差用于衡量p和v两个变量的总体误差,
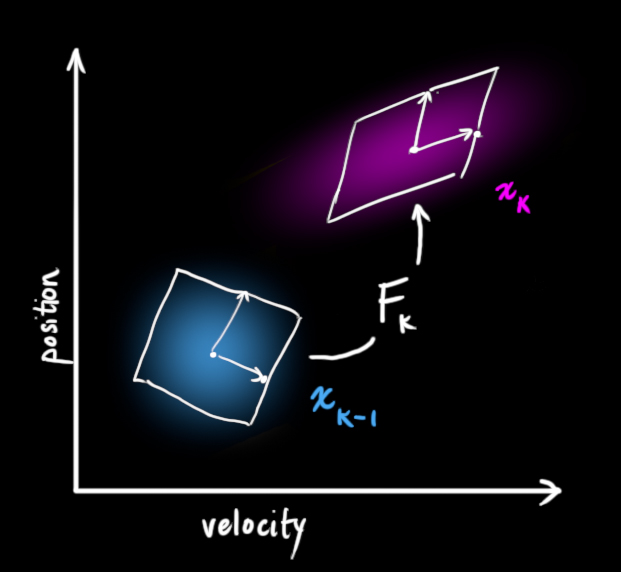
状态迁移描述:

其中的预测过程用一个矩阵描述Fk:
我们预测速度和位置的迁移公式:
预测矩阵描述:
虽然有了预测矩阵,但是我们还不知道如何更新协方差矩阵;
这样我们用下面的方法更新协方差矩阵:
注意这里是大写的P,代表概率,协方差概率;